研究テーマ
The research themes in our Laboratory include:

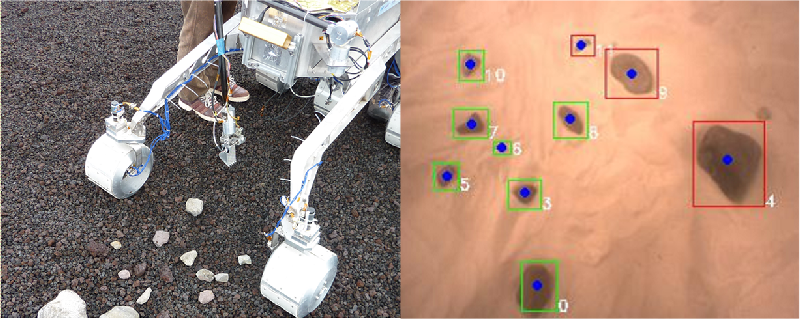
Recognition with Robotic Vision
This theme includes research on vision system for planetary exploration, image processing, recognition algorithm, terrain mapping, sensor fusion, obstacle detection, natural terrain understanding, visual tracking etc.

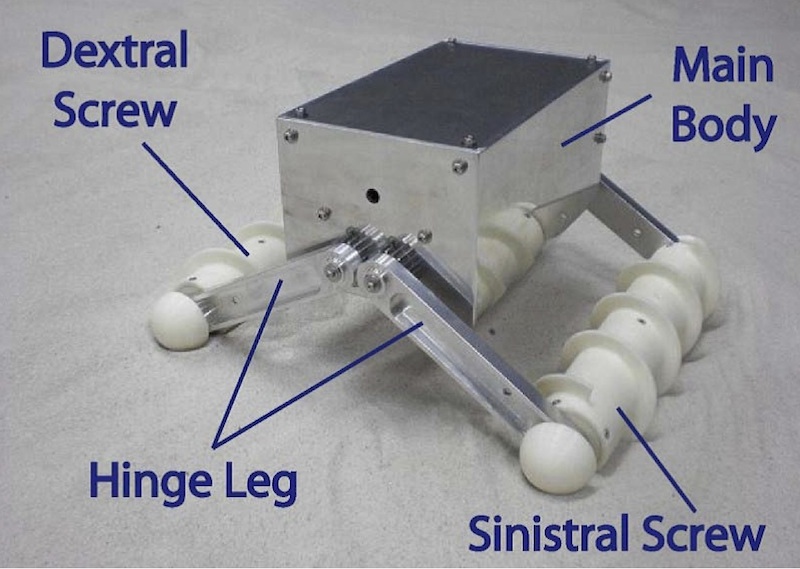
Mobility Mechanism for Explorers
This theme includes walking robot with multiple legs, mole type robot for subsurface exploration, mobility system for wheeled robots, novel rover under micro gravity environment, micro probe robot etc.
Tele-Science with Exploration Robots
This includes advanced tele-operation, small, light-weighted manipulator, smart end-effector, sampling mechanism, control methods etc.
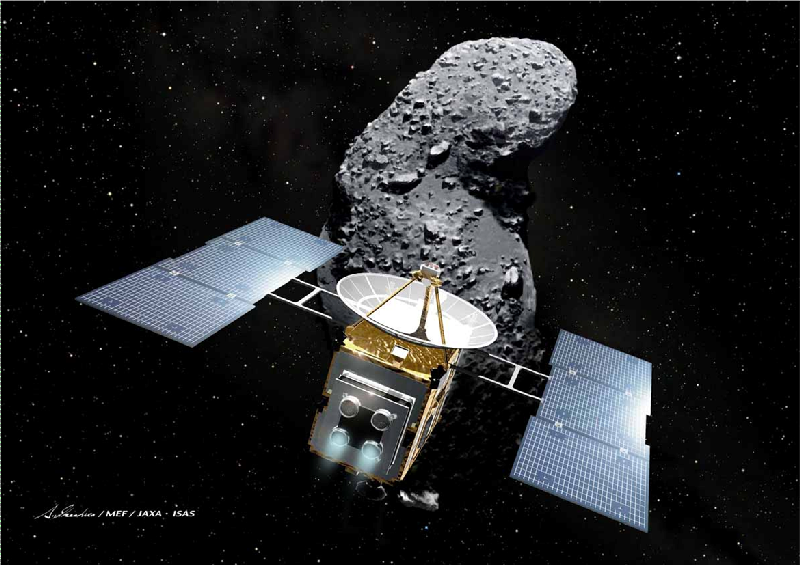
Autonomous Exploration System
This theme includes researches on smart landing, navigation and guidance, visual navigation, intelligent surface exploration, path planning, localization, map matching, behavior planning, semi tele-operation, action learning, cooperative exploration for autonomous explorer in deep space exploration etc.
Developed Rovers
Our laboratory has developed testbed rovers for planetary exploration.
Cuatro
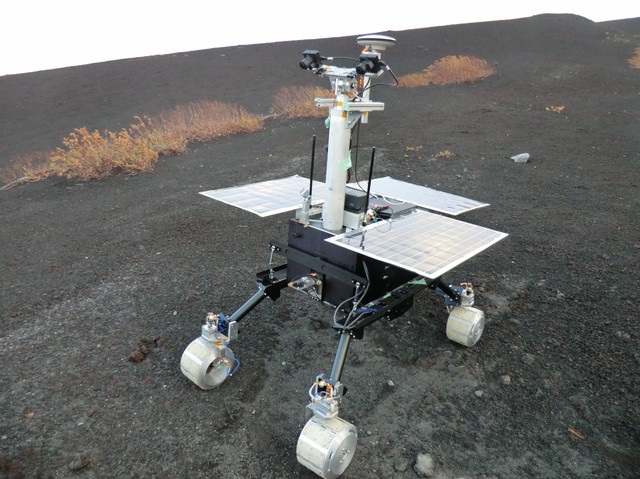
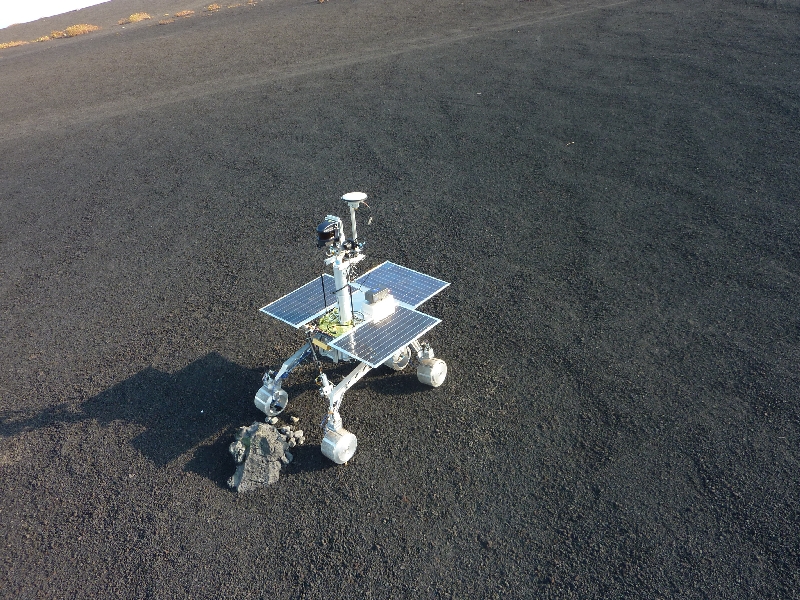
The Cuatro rover is a small four-wheeled testbed rover. It is equipped with gyro sensors, accelerometers and an optional GPS sensor for perception. The mobility system employs a rocker suspension mechanism with independent shock absorbers. The rover weighs 35[kg] with 0.65 × 0.8 × 0.9[m] dimensions.
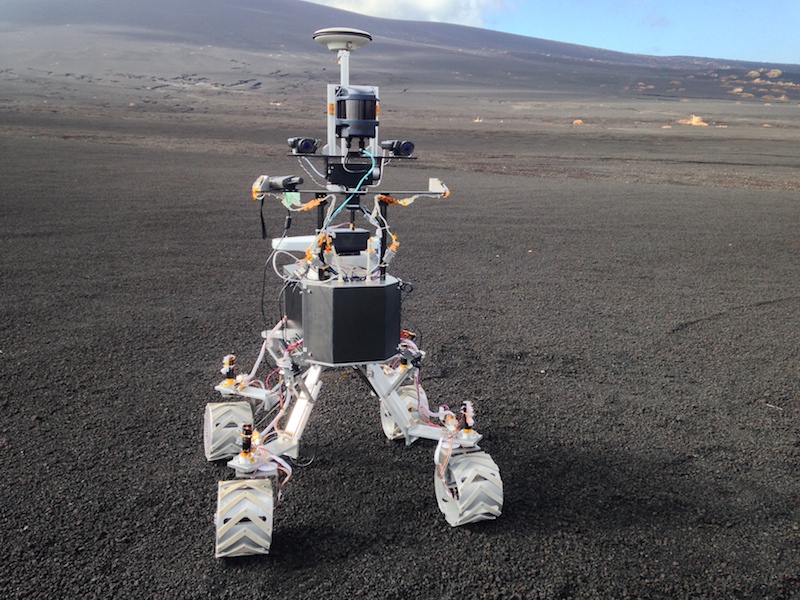
Micro-6
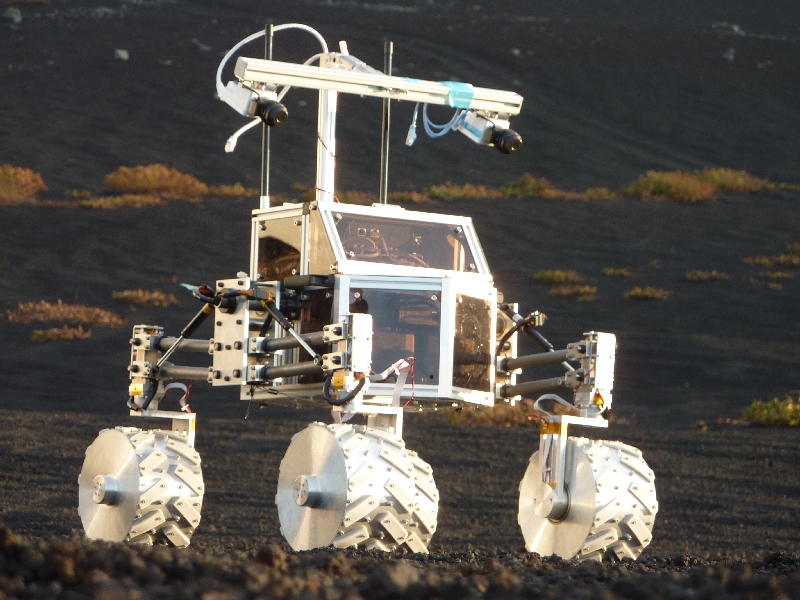
The Micro-6 rover is a testbed rover designed for evaluating autonomous capability in ultimate environments. It is equipped with solar panels, five wheels for omnidirectional mobility, passive rocker suspensions, and a manipulator for scientific rock sampling. It also mounts a stereo camera and Laser Range Finder (LRF) for navigational tasks. The rover weighs 80[kg] with 1.3 × 1.6 × 1.6[m] dimensions.