研究テーマ
久保田研で行っている研究を紹介します

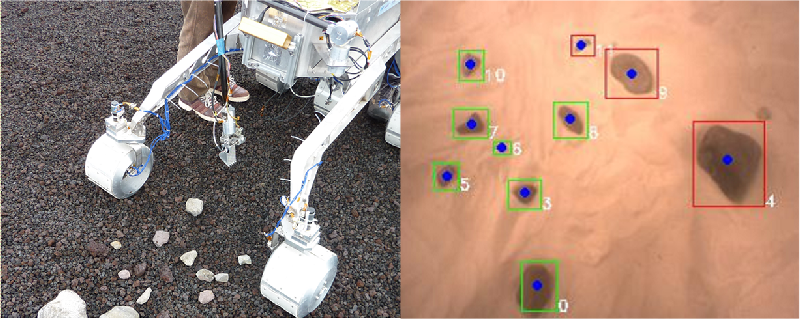
ロボットビジョンによる環境理解
未知環境である惑星を探査するためには,惑星環境を理解することが必要です.そこで,ビジョンシステムの研究,画像処理および環境認識の研究,マップの生成方法,さまざまなセンサを用いたセンサフュージョン,障害物の抽出方法,自然地形の認識方法,画像トラッキングなどの研究を進めています.

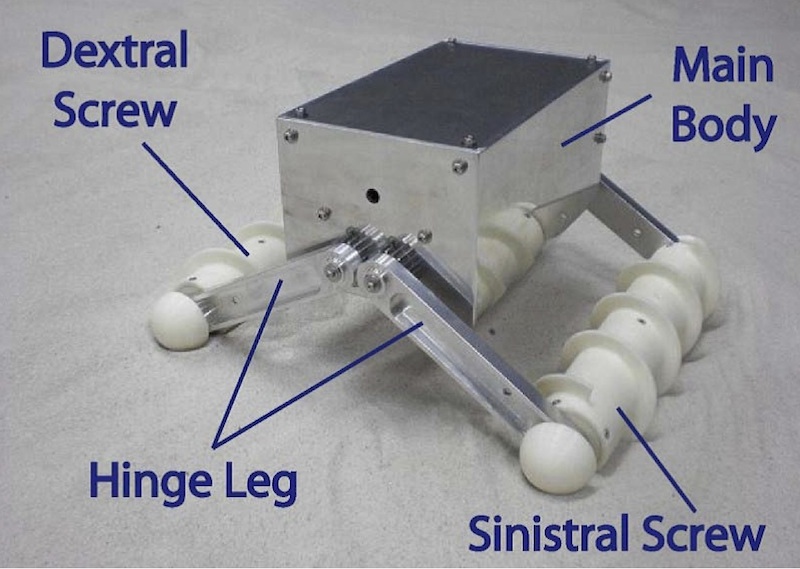
探査ロボットの移動メカニズム
探査する場所は,砂地,岩のごろごろした場所,クレータなどの急斜面,重力の小さい天体表面など,ミッションに応じてさまざまな地形が対象になります.そこで探査ロボットの移動メカニズムの研究を進めています.走破性能の高い脚型ロボット,地中を探査するモグラ型ロボット,柔軟に移動可能な車輪型ロボット,微小重力下における新しい移動メカニズム,超小型昆虫型ロボットなどの研究を進めています.
探査ロボットによるテレサイエンス
月や惑星で活躍するロボットは,移動するだけではなく,サンプルを採取したり,観測機器を設置したり,天文台などの建築を行ったり,さらには将来の有人活動のための拠点つくりをする必要があります.そこで,高度遠隔操縦方式,ヒューマンインタフェース,小型軽量マニピュレータの研究,エンドエフェクタの開発,サンプル採取手法などの研究を進めています.
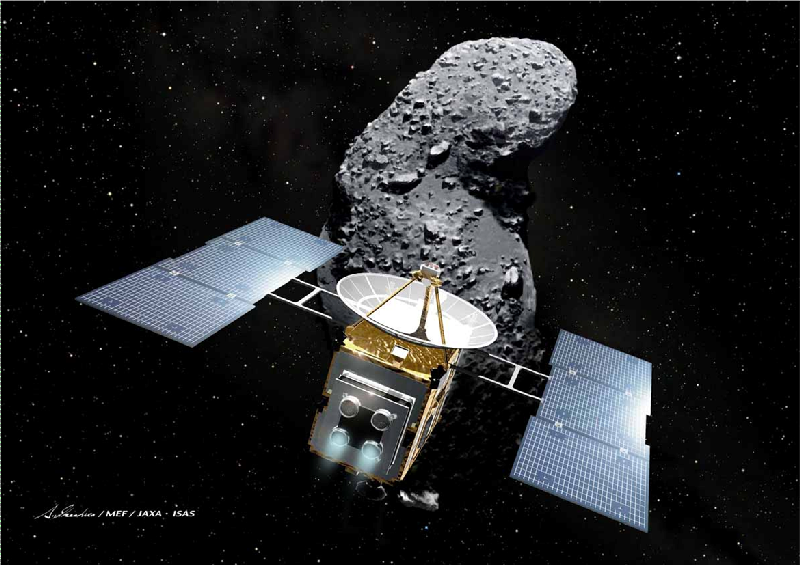
探査機の自律システム
月・惑星・小惑星などの探査において,探査機が安全・確実に任務を遂行するためには,探査機に高度な知能が要求されます.例えば次のようなテーマが含まれます.探査機の故障診断,ミッションプラニング,画像に基づく目標天体への自律接近,自律的な着陸に必要な地形認識・障害物回避・航法誘導制御,画像による天体の形状復元と天体周辺での自律誘導航法,複数探査機の協調による軌道制御などがあります.
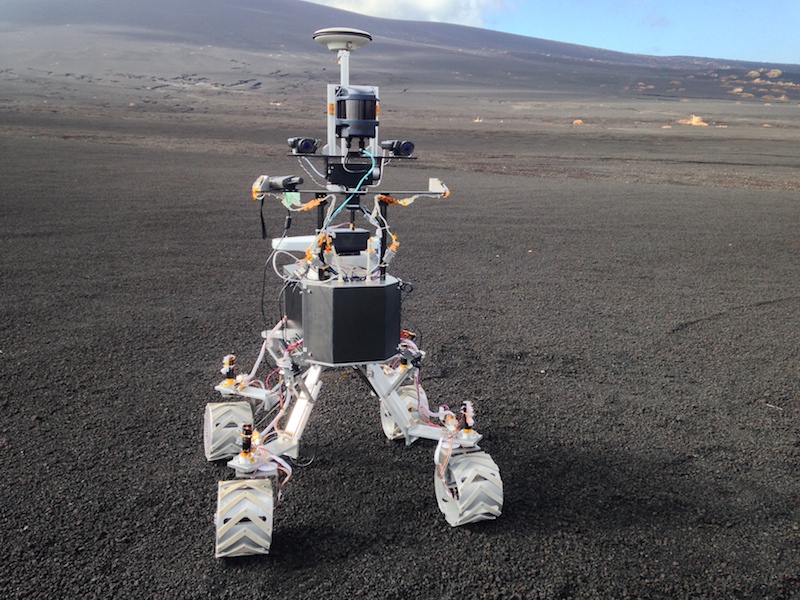
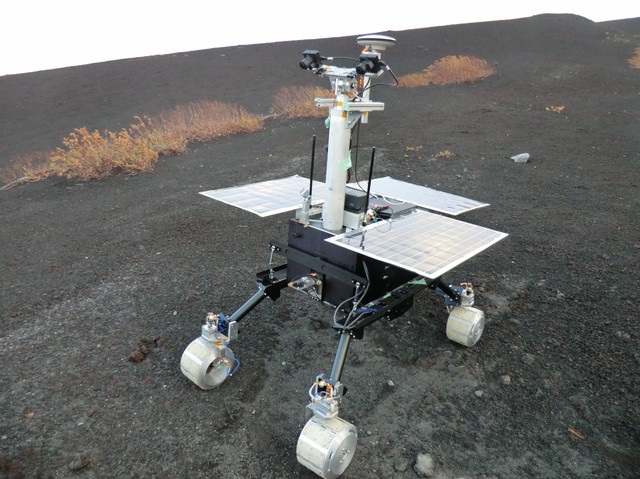
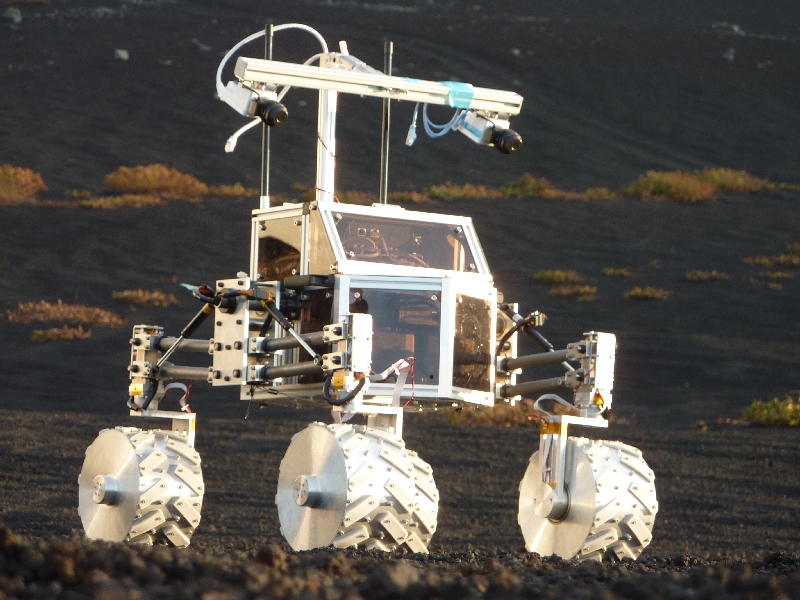
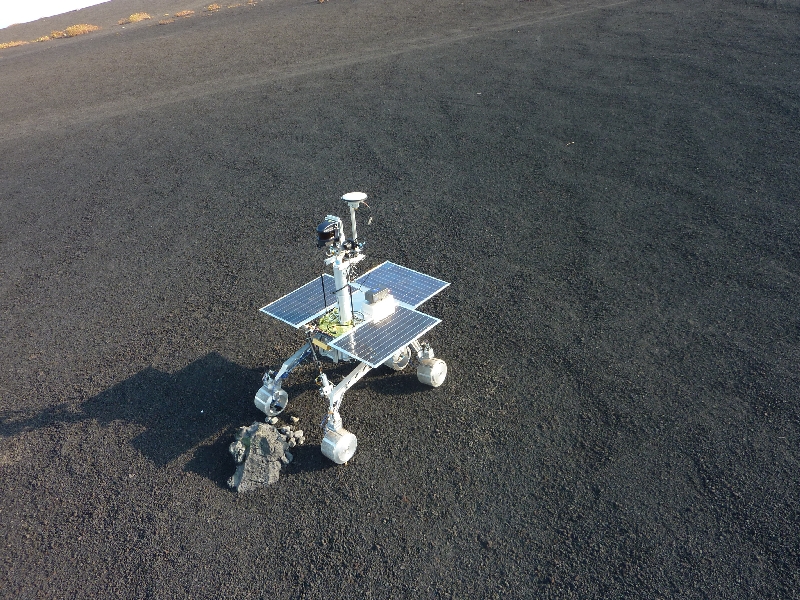
開発ローバ
これまで開発してきた惑星探査ローバです